

时间: 2024-08-01 04:07:06 | 作者: 景观亮化产品
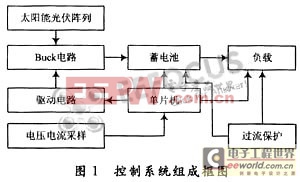
路灯以太阳光为能源,不需要铺设复杂的管线,安全节能无污染。白天利用太阳光给
充电,晚上蓄电池提供能量带动路灯工作。路灯的关/开过程采用光控,采用上限功率跟踪技术,最大限度的吸收太阳能,提高太阳能光电池的效率,以降低路灯系统的成本。最大功点跟踪(Maximum Power PointTracking,
)系统是一种通过调节电气模块的工作状态,使光伏板能够输出更多电能的电气系统。
Buck电路工作原理是通过斩波形式将平均输出电压予以降低,可以将输入接在光伏电池输出端,通过调节其输出电压来达到调节负载之目的,以保持光伏阵列输出电压在其上限功率点的电压和电流处。这里控制目标是输出功率为最大,调节手段是改变开关管的开通占空比。由于光伏阵列的软特性,并不是简单的增大开关管占空比就能增大光伏阵列输出功率。当Buck电路负载为蓄电池时,其构成了蓄电池充电电路,将蓄电池直接接在Buck电路的输出端,通过调节蓄电池的端电压实现蓄电池的充电控制,使用单片机智能操控方法,能轻松实现蓄电池的智能化充放电控制。
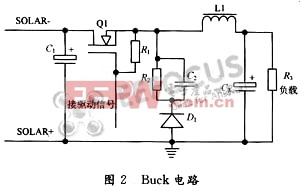
Buck电路为主电路,如图2所示,太阳能光伏阵列输出标称电压为35 V,输出额定电流为4.65 A,蓄电池标称电压为24 V,开关频率为80 kHz。电路工作在电流连续模式时电感量:
式中Ui为太阳能光伏电池输出电压;D为PWM脉冲占空比;f为开关频率;k为k=△I/2Io;△I为纹波电流;Io为负载上的输出电流。
允许的纹波电流△I越小,即k越小,电感L越大,电流纹波越小,可以再一次进行选择较小的滤波电容;反之,电感L较小,但电容较大。一般选取k=0.05~0.1。
将电感值确定以后,实际电感器的设计一定要符合相关电气标准、系统尺寸和安装方法等限制。许多磁性元件供应商均提供各种各样不同型号的标准产品,可满足绝大多数的设计标准要求。
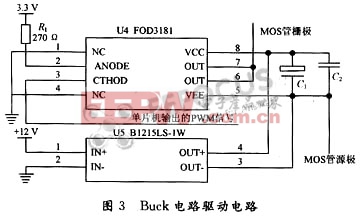
Buck电路为实现上限功率技术的主电路,采用C8051F330单片机来控制,采用有效的算法通过软件编程由单片机输出不同占空比的PWM信号,经由U4,U5处理,如图3所示,驱动开关管Q1的导通与关断。由于单片机C8051F330的驱动电流太小,且Buck电路中MOS管与主电路不共地,故采用隔离作用的B1215LS和输出电流为0.5 A的高速光电耦合的MOS门驱动FOD3181,满足MOS管工作的要求。
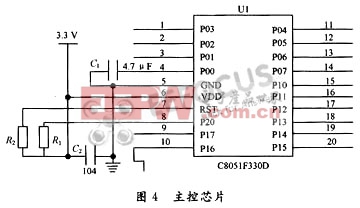
控制板采用C8051F330作为主控制器,该MCU具有高速、微型封装、低功耗、工业级等特点;同时还具有多通道10位AD转换器、PWM输出等丰富的片上资源。
C8051F330(如图4所示)的P0.2为太阳能光伏阵列的电压采样信号输入,P0.3为蓄电池电压采样值的输入,P0.5为主电路中电流信号采样值的输入,P1.6为温度传感器值的输入,P0.6为8位PWM信号输出,P0.4输出控制负载的接入及过流时对电路的关断,P1.0~P1.4接拨码开关,为路灯设置定时,其定时长短由拨码开关的状态决定,四位拨码开关共24=16个状态,分别可定时1~16个小时。
目前太阳能发电系统主要为了节能,采用绿色能源而不接入市电,或者用于网电未涉及的地域,所以总系统的工作需要太阳能电池板所产生的电能量经转换或处理后的电源的支持,在本课题中欲采用+3.3 V和12 V电源,以支持控制芯片和集成运算放大电路或晶体管的工作。12 V电源主要是给系统电路中的三极管等元件的正常工作提供能量,由于采用了凌阳C8051F330单片机来控制,故系统要提供+3.3 V的电源。
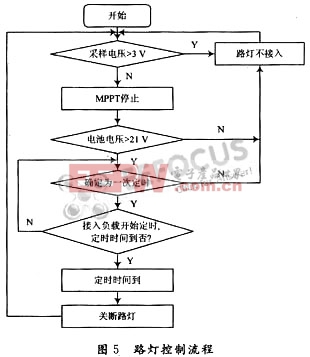
路灯的接人以太阳能板的电压为依据,当采样电压3 V时,太阳光已暗,接入路灯,开始定时,定时时间值由拨码开关设置。同时停止MPPT,以减小夜间的能量损耗。当定时时间到后,断开路灯。在总系统工作过程中,单片机始终采集蓄电池的端电压,路灯是否接入以及接入后,若发生蓄电池过放现象,单片机P0.4引脚输出高电平,断开路灯,保护蓄电池。待蓄电池通过充电电压升高后,如满足接人条件,再接人路灯。在本设计中,加入了上限功率跟踪技术,使输入功率提高了20%。由于蓄电池的容量远大于太阳能光伏阵列的充电能力,蓄电池充电时未采用防过充措施。
经实际运行表明,该控制管理系统具有电路结构相对比较简单、工作稳定可靠、实用性强等优点,较好地将太阳能光伏技术与路灯控制技术结合起来,并实现了智能控制。
时间: 2024-08-01 04:07:06 | 作者: 景观亮化产品
路灯以太阳光为能源,不需要铺设复杂的管线,安全节能无污染。白天利用太阳光给
充电,晚上蓄电池提供能量带动路灯工作。路灯的关/开过程采用光控,采用上限功率跟踪技术,最大限度的吸收太阳能,提高太阳能光电池的效率,以降低路灯系统的成本。最大功点跟踪(Maximum Power PointTracking,
)系统是一种通过调节电气模块的工作状态,使光伏板能够输出更多电能的电气系统。
Buck电路工作原理是通过斩波形式将平均输出电压予以降低,可以将输入接在光伏电池输出端,通过调节其输出电压来达到调节负载之目的,以保持光伏阵列输出电压在其上限功率点的电压和电流处。这里控制目标是输出功率为最大,调节手段是改变开关管的开通占空比。由于光伏阵列的软特性,并不是简单的增大开关管占空比就能增大光伏阵列输出功率。当Buck电路负载为蓄电池时,其构成了蓄电池充电电路,将蓄电池直接接在Buck电路的输出端,通过调节蓄电池的端电压实现蓄电池的充电控制,使用单片机智能操控方法,能轻松实现蓄电池的智能化充放电控制。
Buck电路为主电路,如图2所示,太阳能光伏阵列输出标称电压为35 V,输出额定电流为4.65 A,蓄电池标称电压为24 V,开关频率为80 kHz。电路工作在电流连续模式时电感量:
式中Ui为太阳能光伏电池输出电压;D为PWM脉冲占空比;f为开关频率;k为k=△I/2Io;△I为纹波电流;Io为负载上的输出电流。
允许的纹波电流△I越小,即k越小,电感L越大,电流纹波越小,可以再一次进行选择较小的滤波电容;反之,电感L较小,但电容较大。一般选取k=0.05~0.1。
将电感值确定以后,实际电感器的设计一定要符合相关电气标准、系统尺寸和安装方法等限制。许多磁性元件供应商均提供各种各样不同型号的标准产品,可满足绝大多数的设计标准要求。
Buck电路为实现上限功率技术的主电路,采用C8051F330单片机来控制,采用有效的算法通过软件编程由单片机输出不同占空比的PWM信号,经由U4,U5处理,如图3所示,驱动开关管Q1的导通与关断。由于单片机C8051F330的驱动电流太小,且Buck电路中MOS管与主电路不共地,故采用隔离作用的B1215LS和输出电流为0.5 A的高速光电耦合的MOS门驱动FOD3181,满足MOS管工作的要求。
控制板采用C8051F330作为主控制器,该MCU具有高速、微型封装、低功耗、工业级等特点;同时还具有多通道10位AD转换器、PWM输出等丰富的片上资源。
C8051F330(如图4所示)的P0.2为太阳能光伏阵列的电压采样信号输入,P0.3为蓄电池电压采样值的输入,P0.5为主电路中电流信号采样值的输入,P1.6为温度传感器值的输入,P0.6为8位PWM信号输出,P0.4输出控制负载的接入及过流时对电路的关断,P1.0~P1.4接拨码开关,为路灯设置定时,其定时长短由拨码开关的状态决定,四位拨码开关共24=16个状态,分别可定时1~16个小时。
目前太阳能发电系统主要为了节能,采用绿色能源而不接入市电,或者用于网电未涉及的地域,所以总系统的工作需要太阳能电池板所产生的电能量经转换或处理后的电源的支持,在本课题中欲采用+3.3 V和12 V电源,以支持控制芯片和集成运算放大电路或晶体管的工作。12 V电源主要是给系统电路中的三极管等元件的正常工作提供能量,由于采用了凌阳C8051F330单片机来控制,故系统要提供+3.3 V的电源。
路灯的接人以太阳能板的电压为依据,当采样电压3 V时,太阳光已暗,接入路灯,开始定时,定时时间值由拨码开关设置。同时停止MPPT,以减小夜间的能量损耗。当定时时间到后,断开路灯。在总系统工作过程中,单片机始终采集蓄电池的端电压,路灯是否接入以及接入后,若发生蓄电池过放现象,单片机P0.4引脚输出高电平,断开路灯,保护蓄电池。待蓄电池通过充电电压升高后,如满足接人条件,再接人路灯。在本设计中,加入了上限功率跟踪技术,使输入功率提高了20%。由于蓄电池的容量远大于太阳能光伏阵列的充电能力,蓄电池充电时未采用防过充措施。
经实际运行表明,该控制管理系统具有电路结构相对比较简单、工作稳定可靠、实用性强等优点,较好地将太阳能光伏技术与路灯控制技术结合起来,并实现了智能控制。
